 |
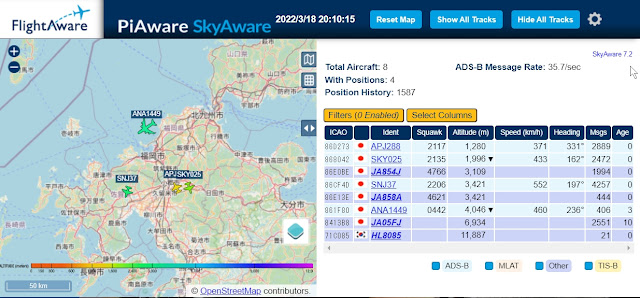
| SkyView map: PiAware SkyAware 7.2 |
Raspberry Pi Desktop for PC にdump1090-fa をインストールし、ローカルのウェブサーバー(lighttpd)にADB-Sの受信状況を上記の様に表示させてみました。SkyView mapまたはSkyAware mapと呼ぶらしい。
先ず、Raspberry Pi Desktop for PC は日本語化とスクリーンキャプチャーを入れた状態から始めます。※USB接続のHDDにインストールしています。Windows10のPCです。
- RTL-SDRの動作確認
メニュー「設定」の「Add/Remove Software」でRTL-SDRを検索し、インストールする。※出来るだけGUIでやってみます。
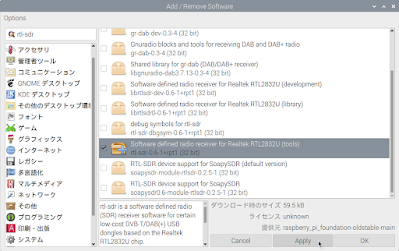 |
| 「Add/Remove Software」でRTL-SDRを検索 |
参照サイト RTL-SDRを動かしてみました
デバイスを接続して、rtl_testコマンドで動作確認・・・OK!
$ rtl_test
Found 1 device(s):
0: Realtek, RTL2838UHIDIR, SN: 00000001
Using device 0: Generic RTL2832U OEM
Detached kernel driver
Found Rafael Micro R820T tuner
以下省略 Found 1 device なので、認識してる
- dump1090-faとlighttpdをインストール
dump1090-mutabilityは1項と同様にGUIでインストール可能ですが、fa版は不可。 fa版は下記参照
ここのINSTALL DUMP1090:
(3) For Debian 9 & 10 and Ubuntu 18 & 19 (dump1090-fa)
$ sudo bash -c "$(wget -O - https://raw.githubusercontent.com/abcd567a/fr24feed-debian-ubuntu-amd64/master/install-dump1090-fa.sh)"こ
※上記はlighttpdとdump1090-faをインストールするスクリプトです。
これでlighttpdは1.4.53、dump1090-faはVer7.2がインストールされました。
※昨夜は巧くいったのに今日はエラーが出てdump1090-faがインストールされなかった。別途、ググって下記を見つけた。
・
abcd567a/piaware-ubuntu20-amd64上記のインストール方法でやってみたら、dump1090-fa 7.2が入りました。
※
ローカルポート:skyawareが使えなくなり、8080になってしまった。何故?※ローカルポート/skyaware or ローカルポート:8080 でした。両方OK!
※
Dump1090-fa showing 404-not foundsudo bash -c "$(wget -O - https://raw.githubusercontent.com/abcd567a/piaware-ubuntu20-amd64/master/install-dump1090-fa.sh)"
===============
ALL DONE - dump1090-fa (Flightaware version)
===============
(1) In your browser, go to web interface at
誤 http://192.168.xxx.xxx/dump1090-fa/
正 http://192.168.xxx.xxx/skyaware/
REBOOT YOUR COMPUTER IF MAP DOES NOT SHOW, OR SHOWS ERROR MESSAGE
In case you want to change/add settings of dump1090-fa, edit following files:
sudo nano /etc/default/dump1090-fa
sudo nano /usr/share/dump1090-fa/html/config.js か
$ dump1090-fa --help
-----------------------------------------------------------------------------
| dump1090 ModeS Receiver dump1090-fa 7.2 |
| build options: ENABLE_RTLSDR ENABLE_BLADERF ENABLE_HACKRF ENABLE_LIMESDR |
-----------------------------------------------------------------------------
--device-type <type> Select SDR type (default: rtlsdr)
rtlsdr-specific options (use with --device-type rtlsdr)
--device <index|serial> select device by index or serial number
--enable-agc enable digital AGC (not tuner AGC!)
--ppm <correction> set oscillator frequency correction in PPM
--direct <0|1|2> set direct sampling mode
bladeRF-specific options (use with --device-type bladerf)
--device <ident> select device by bladeRF 'device identifier'
--bladerf-fpga <path> use alternative FPGA bitstream ('' to disable FPGA load)
--bladerf-decimation <N> assume FPGA decimates by a factor of N
--bladerf-bandwidth <hz> set LPF bandwidth ('bypass' to bypass the LPF)
HackRF-specific options (use with --device-type hackrf)
--enable-amp enable amplifier)
--enable-antenna-power enable DC power to the antenna connector
--lna-gain set LNA gain (Range 0-40 in 8dB steps))
--vga-gain set VGA gain (Range 0-62 in 2dB steps))
--samplerate set sample rate)
--ppm ppm correction)
limesdr-specific options (use with --device-type limesdr)
--limesdr-verbosity set verbosity level for LimeSDR messages
--limesdr-serial serial number of desired device
--limesdr-channel set number of an RX channel
--limesdr-oversample set RF oversampling ratio
--limesdr-gain set normalized gain (range: 0.0 to 1.0)
--limesdr-lpfbw set LPF bandwidth
--limesdr-bw set bandwidth
ifile-specific options (use with --ifile)
--ifile <path> read samples from given file ('-' for stdin)
--iformat <type> set sample format (UC8, SC16, SC16Q11)
--throttle process samples at the original capture speed
Output modes
--raw Show only messages hex values
--modeac Enable decoding of SSR Modes 3/A & 3/C
--mlat display raw messages in Beast ascii mode
--onlyaddr Show only ICAO addresses (testing purposes)
--metric Use metric units (meters, km/h, ...)
--gnss Show altitudes as HAE/GNSS when available
--quiet Disable output to stdout. Use for daemon applications
--show-only <addr> Show only messages from the given ICAO on stdout
--snip <level> Strip IQ file removing samples < level
Decoder settings
--gain <db> Set gain in dB (default: varies by SDR type)
--freq <hz> Set frequency (default: 1090 Mhz)
--fix Enable single-bit error correction using CRC
--fix-2bit Enable two-bit error correction using CRC
(use with caution!)
--no-fix Disable error correction using CRC
--no-fix-df Disable error correction of the DF message field
(reduces CPU requirements)
--no-crc-check Disable messages with broken CRC (discouraged)
--enable-df24 Enable decoding of DF24 Comm-D ELM messages
--lat <latitude> Reference/receiver latitude for surface positions
--lon <longitude> Reference/receiver longitude for surface positions
--max-range <distance> Absolute maximum range for position decoding (in NM)
Adaptive gain
--adaptive-burst Adjust gain for too-loud message bursts
--adaptive-burst-change-delay <s> Set delay after changing gain before
resuming burst control (seconds)
--adaptive-burst-alpha <a> Set burst rate smoothing factor
(0..1, smaller=more smoothing)
--adaptive-burst-loud-rate <r> Set burst rate for gain decrease
--adaptive-burst-loud-runlength <l> Set burst runlength for gain decrease
--adaptive-burst-quiet-rate <r> Set burst rate for gain increase
--adaptive-burst-quiet-runlength <l> Set burst runlength for gain increase
--adaptive-range Adjust gain for target dynamic range
--adaptive-range-target <db> Set target dynamic range in dB
--adaptive-range-alpha <a> Set dynamic range noise smoothing factor
(0..1, smaller=more smoothing)
--adaptive-range-percentile <p> Set dynamic range noise percentile
--adaptive-range-change-delay <s> Set delay after changing gain before
resuming dynamic range control (seconds)
--adaptive-range-scan-delay <s> Set scan interval for dynamic range
gain scanning following a gain decrease
due to an increase in noise (seconds)
--adaptive-range-rescan-delay <s> Set periodic rescan interval for dynamic
range gain scanning (seconds)
--adaptive-min-gain <g> Set gain adjustment range lower limit (dB)
--adaptive-max-gain <g> Set gain adjustment range upper limit (dB)
--adaptive-duty-cycle <p> Set adaptive gain duty cycle % (1..100)
Network connections
--net Enable networking with default ports unless overridden
--no-modeac-auto Don't enable Mode A/C if requested by a net connection
--net-only Enable just networking, no RTL device or file used
--net-bind-address <ip> IP address to bind to (use 127.0.0.1 for private)
--net-ri-port <ports> TCP raw input listen ports (default: 30001)
--net-ro-port <ports> TCP raw output listen ports (default: 30002)
--net-sbs-port <ports> TCP BaseStation output listen ports (default: 30003)
--net-bi-port <ports> TCP Beast input listen ports (default: 30004,30104)
--net-bo-port <ports> TCP Beast output listen ports (default: 30005)
--net-stratux-port <ports> TCP Stratux output listen ports (default: disabled)
--net-ro-size <size> TCP output minimum size (default: 0)
--net-ro-interval <rate> TCP output memory flush rate in seconds (default: 0)
--net-heartbeat <rate> TCP heartbeat rate in seconds
(default: 60 sec; 0 to disable)
--net-buffer <n> TCP buffer size 64Kb * (2^n) (default: n=0, 64Kb)
--net-verbatim Make output connections default to verbatim mode
(forward all messages without correction)
--forward-mlat Allow forwarding of received mlat results
Stats and json output
--stats Show stats summary at exit.
--stats-every <seconds> Show and reset stats every <seconds> seconds
--stats-range Collect/show range histogram
--write-json <dir> Periodically write json output to <dir>
(for serving by a separate webserver)
--write-json-every <t> Write json aircraft output every t seconds (default 1)
--json-stats-every <t> Write json stats output every t seconds (default 60)
--json-location-accuracy <n> Accuracy of receiver location in json metadata
(0=no location, 1=approximate, 2=exact)
Interactive mode
--interactive Interactive mode refreshing data on screen.
Implies --throttle
--interactive-ttl <sec> Remove from list if idle for <sec>
--interactive-show-distance Show aircraft distance and bearing
(requires --lat and --lon)
--interactive-distance-units <u> Distance units ('km', 'sm', 'nm')
--interactive-callsign-filter <r> Filter rows by callsign against regex
Misc
--wisdom <path> Read DSP wisdom from given path
--version Show version, build and DSP options
--help Show this help
- dump1090-fa に位置情報を記入
参照サイト How-to Install dump1090-fa and Piaware on Arch Linux x64_86 and on AlarmPi Armv7 & Aarch64
(1) Open file “dump1090-fa” for editing
$ sudo nano /etc/default/dump1090-fa
RECEIVER_LAT=xx.xxxx #緯度 latitude
RECEIVER_LON=xxx.xxx #経度 longitude
受信地の経度・緯度を書き込み・終了しリスタートすると、設定した位置の地図に同心円が表示され、画面右側のDistanceも表示されます。別の地域が表示されている時は「Reset Map」をクリックしてみてください。同心円の距離は画面右上のギヤマークをクリックして、Units:で単位を変えることが出来ます。
Aeronautical/Metric/Imperial => nm/km/mi(海里/km/マイル)
dump1090-faのサービスには下記のコマンドを使用します。
- $ sudo systemctl enable dump1090-fa.service #サービスを有効化
- $ sudo service dump1090-fa start #サービスを開始
- $ sudo service dump1090-fa stop #サービスを停止
- $ sudo systemctl disable dump1090-fa #サービスを無効化
--
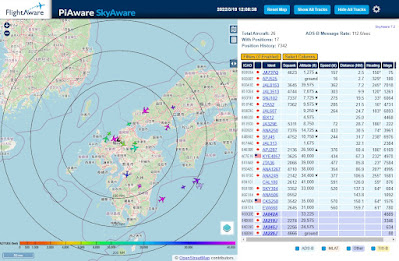 |
| SkyAware map |
フィードしなくてもADS-Bの受信状況は分かりやすいし、航空機との距離も表示されるのでこれは良いですね。
--
dump1090-mutability から dump1090-fa に変更する方法は下記参照。未だ試してないけど…。
ググっていて下記を見つけました。
Flightradar24にフィードせずに、dump1090-mutabilityをインストールして、SkyAwareマップみたいなのが見れないか試したことがあります。どこかにウェブ機能は無効になっていると書いて有り、やってみても表示されないので、mutability版では簡単に出来ないのだと思ってました。上記記事を読んで、Flghtradar24にフィードしている環境のmutability版では確認していなかったので確認してみました。ポート番号は何だろうと思いつつ、/dump1090を付けてやってみたら、マップ表示が現れました。
- ローカルポート/dump1090/gmap.html
地図の初期位置設定はどこでやるのかな? 3項の方法で位置情報は書き込めるけど、同心円は描かれないし、距離も表示されない。マップのオーバーレイ設定にはチェックマーク有りだし。「reset map」をクリックするとミラノ付近を表示する。???
原因は「LAT=""」とダブルコーテーションが2つ書いてあったので、その間に入力したのが間違いかな?? それとも/etc/dump1090-mutability/config.js に位置情報を書き込むのかも?? まだ不明です。どこだろう??
別のPCからアクセスしてみたら、reset map」が効いて地図の初期位置が開きます。同心円は表示されません。同じところを見ているのに???
航空機をクリックしたときのリンク先はあちこちのサイトが有って、これが良いかも。
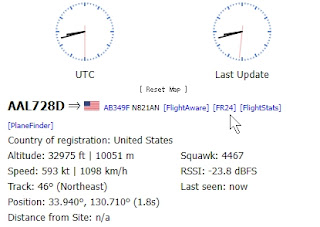 |
| dump1090-mutability |
--
素直にフィードしているPCのdump1090をfa版に入れ替えた方が良いかも。
--
同心円の描き方
--
初心者向けアンテナのスレッド









